![[ 딥러닝 코드 리뷰 - PRMI Lab ] - DDPM 코드 리뷰 및 실행](https://img1.daumcdn.net/thumb/R750x0/?scode=mtistory2&fname=https%3A%2F%2Fblog.kakaocdn.net%2Fdn%2FbQl9Gm%2FbtsMMEo4AKW%2F3WQhzupNSkUaWw7oZl9hCK%2Fimg.png)
이번에는 DDPM 공식 레포 코드를 분석하고 그 안에 구현된 디테일들이나 최신 기술들에 대해 알아보려고합니다. 마지막에는 직접 돌려봐서 celeba 데이터셋에 대해서 훈련시키고 샘플링시키는 작업까지 해보겠습니다.
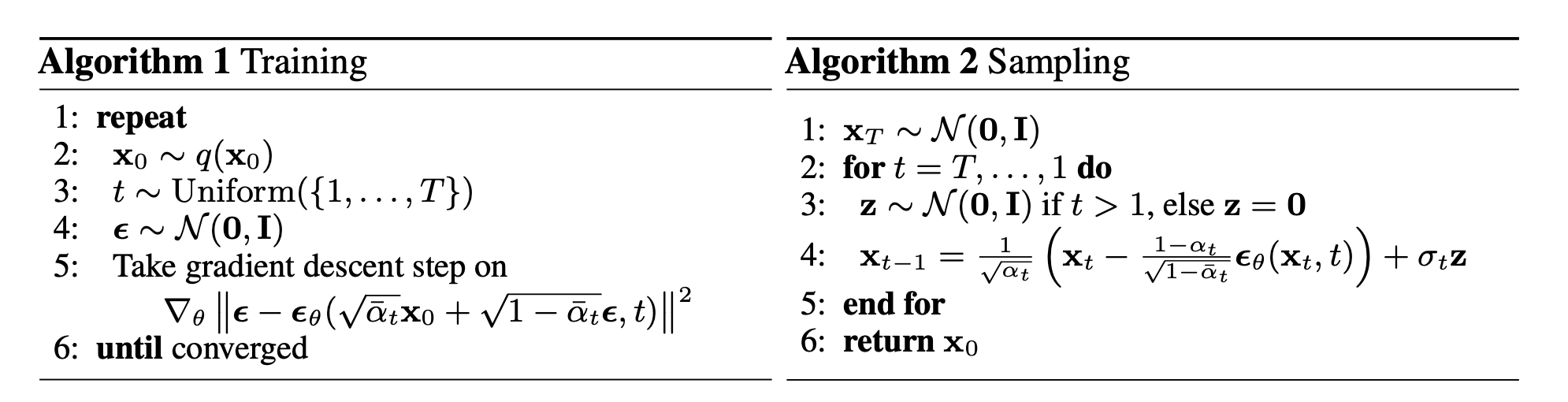
논문 링크: https://arxiv.org/pdf/2006.11239
U-Net
model
class Unet(Module):
def __init__(
self,
dim,
init_dim = None,
out_dim = None,
dim_mults = (1, 2, 4, 8),
channels = 3,
self_condition = False,
learned_variance = False,
learned_sinusoidal_cond = False,
random_fourier_features = False,
learned_sinusoidal_dim = 16,
sinusoidal_pos_emb_theta = 10000,
dropout = 0.,
attn_dim_head = 32,
attn_heads = 4,
full_attn = None, # defaults to full attention only for inner most layer
flash_attn = False
):
super().__init__()
# determine dimensions
self.channels = channels
self.self_condition = self_condition
input_channels = channels * (2 if self_condition else 1)
# init_dim이 없으면 dim으로
init_dim = default(init_dim, dim)
self.init_conv = nn.Conv2d(input_channels, init_dim, 7, padding = 3)
# [dim, dim, dim * (dim_mults)[0], dim * (dim_mults)[1], ..., (dim_mults)[len(dim_mults) - 1]]
# [64, 64, 128, 256, 512]
dims = [init_dim, *map(lambda m: dim * m, dim_mults)]
in_out = list(zip(dims[:-1], dims[1:]))
# time embeddings
time_dim = dim * 4
self.random_or_learned_sinusoidal_cond = learned_sinusoidal_cond or random_fourier_features
# time embedding(positional encoding)을 위한 SinusoidalPosEmb 생성.
if self.random_or_learned_sinusoidal_cond:
sinu_pos_emb = RandomOrLearnedSinusoidalPosEmb(learned_sinusoidal_dim, random_fourier_features)
fourier_dim = learned_sinusoidal_dim + 1
else:
sinu_pos_emb = SinusoidalPosEmb(dim, theta = sinusoidal_pos_emb_theta)
fourier_dim = dim
# 선언한 sinu_pos_emb를 time_mlp에 추가 --> Linear --> GELU --> Linear
self.time_mlp = nn.Sequential(
sinu_pos_emb,
nn.Linear(fourier_dim, time_dim),
nn.GELU(),
nn.Linear(time_dim, time_dim)
)
# attention
if not full_attn:
full_attn = (*((False,) * (len(dim_mults) - 1)), True)
num_stages = len(dim_mults)
full_attn = cast_tuple(full_attn, num_stages)
attn_heads = cast_tuple(attn_heads, num_stages)
attn_dim_head = cast_tuple(attn_dim_head, num_stages)
assert len(full_attn) == len(dim_mults)
# prepare blocks
FullAttention = partial(Attention, flash = flash_attn)
resnet_block = partial(ResnetBlock, time_emb_dim = time_dim, dropout = dropout)
# layers
self.downs = ModuleList([])
self.ups = ModuleList([])
num_resolutions = len(in_out)
# Down-sampling (downs)
for ind, ((dim_in, dim_out), layer_full_attn, layer_attn_heads, layer_attn_dim_head) in enumerate(zip(in_out, full_attn, attn_heads, attn_dim_head)):
is_last = ind >= (num_resolutions - 1)
attn_klass = FullAttention if layer_full_attn else LinearAttention
self.downs.append(ModuleList([
resnet_block(dim_in, dim_in),
resnet_block(dim_in, dim_in),
attn_klass(dim_in, dim_head = layer_attn_dim_head, heads = layer_attn_heads),
Downsample(dim_in, dim_out) if not is_last else nn.Conv2d(dim_in, dim_out, 3, padding = 1)
]))
# Mid block
mid_dim = dims[-1]
self.mid_block1 = resnet_block(mid_dim, mid_dim)
self.mid_attn = FullAttention(mid_dim, heads = attn_heads[-1], dim_head = attn_dim_head[-1])
self.mid_block2 = resnet_block(mid_dim, mid_dim)
# Up-sampling (ups)
for ind, ((dim_in, dim_out), layer_full_attn, layer_attn_heads, layer_attn_dim_head) in enumerate(zip(*map(reversed, (in_out, full_attn, attn_heads, attn_dim_head)))):
is_last = ind == (len(in_out) - 1)
attn_klass = FullAttention if layer_full_attn else LinearAttention
self.ups.append(ModuleList([
resnet_block(dim_out + dim_in, dim_out),
resnet_block(dim_out + dim_in, dim_out),
attn_klass(dim_out, dim_head = layer_attn_dim_head, heads = layer_attn_heads),
Upsample(dim_out, dim_in) if not is_last else nn.Conv2d(dim_out, dim_in, 3, padding = 1)
]))
default_out_dim = channels * (1 if not learned_variance else 2)
self.out_dim = default(out_dim, default_out_dim)
self.final_res_block = resnet_block(init_dim * 2, init_dim)
self.final_conv = nn.Conv2d(init_dim, self.out_dim, 1)
@property
def downsample_factor(self):
return 2 ** (len(self.downs) - 1)
# DDPM의 reverse process과정
def forward(self, x, time, x_self_cond = None):
assert all([divisible_by(d, self.downsample_factor) for d in x.shape[-2:]]), f'your input dimensions {x.shape[-2:]} need to be divisible by {self.downsample_factor}, given the unet'
if self.self_condition:
x_self_cond = default(x_self_cond, lambda: torch.zeros_like(x))
x = torch.cat((x_self_cond, x), dim = 1)
x = self.init_conv(x)
r = x.clone()
t = self.time_mlp(time)
h = []
for block1, block2, attn, downsample in self.downs:
x = block1(x, t)
h.append(x)
x = block2(x, t)
x = attn(x) + x
h.append(x)
x = downsample(x)
x = self.mid_block1(x, t)
x = self.mid_attn(x) + x
x = self.mid_block2(x, t)
for block1, block2, attn, upsample in self.ups:
x = torch.cat((x, h.pop()), dim = 1)
x = block1(x, t)
x = torch.cat((x, h.pop()), dim = 1)
x = block2(x, t)
x = attn(x) + x
x = upsample(x)
x = torch.cat((x, r), dim = 1)
x = self.final_res_block(x, t)
# 해당 값이 predicted noise값값
return self.final_conv(x)
Unet에 대해서는 다 아실거라고 생각하고 간단히 정리하겠습니다.
- x_self_cond
- 이는 이전 출력을 다음 입력에 추가해서 넣어주기 위한 인자입니다.
- init_conv
- input_channels -> init_dim으로 차원 embedding을 해주는 시작 convolution입니다.
- dims
- dim_mults로 U-net의 downsample 차원을 조절해줍니다.
- dim_mults가 (1, 2, 4, 8) 이면 [init_dim, init_dim*1, init_dim*2, init_dim*4, init_dim*8]
- time_dim
- ddpm에서 현재 timestep T를 Unet의 input으로 넣어주는데, 이에 대한 embedding 크기를 나타냅니다.
- random_or_learned_sinusoidal_cond
- positional embedding을 학습시킬것인지에 대한 인자입니다.
- time_mlp
- Linear -> GELU -> Linear로 우리가 원하는 크기의 time embedding을 만듭니다.
- FullAttention
- Unet에서 Attention을 사용하기 위해 정의한 부분입니다. (class Attention)
- flash = flash_attn을 주어 더 빠른 flash attention을 수행시켜줄 수 있습니다. (저는 4090에서 flash attention을 지원하지 않아 못돌렸습니다.)
- Unet에서 Attention을 사용하기 위해 정의한 부분입니다. (class Attention)
- downs, ups
- ModuleList들을 저장한 배열인데, downs에는 resnet_block -> resnet_block -> attn_klass -> downsample을 저장해줍니다.
- forward()에서 downs배열을 for돌아서 넣고 mid_block 후에 ups배열 다 돈다음에 끝납니다.
- 참고로 time embedding과 추가로 concatenate해서 돌리기 때문에, 배열의 차원이 기존과는 다릅니다.
- class ResNetBlock을 참고하시면 될거 같습니다.
Attention, Positional Encoding과 관련된 부분은 설명하지 않겠습니다. Attention부분은 eipons 라이브러리로 대부분이 구현되어 있으며, mem key_value 를 사용하여 메모리 효율성을 높인 구현체입니다. 궁금하면 class Attention(full_attn)과 LinearAttention을 보시기 바랍니다. Positional Encoding은 이전의 NeRF code 분석글을 참고하시기 바랍니다.
GaussianDiffusion
class GaussianDiffusion(Module):
def __init__(
self,
model,
*,
image_size,
timesteps = 1000,
sampling_timesteps = None,
objective = 'pred_v',
beta_schedule = 'sigmoid',
schedule_fn_kwargs = dict(),
ddim_sampling_eta = 0.,
auto_normalize = True,
offset_noise_strength = 0., # https://www.crosslabs.org/blog/diffusion-with-offset-noise
min_snr_loss_weight = False, # https://arxiv.org/abs/2303.09556
min_snr_gamma = 5,
immiscible = False
):
super().__init__()
assert not (type(self) == GaussianDiffusion and model.channels != model.out_dim)
assert not hasattr(model, 'random_or_learned_sinusoidal_cond') or not model.random_or_learned_sinusoidal_cond
self.model = model
self.channels = self.model.channels
self.self_condition = self.model.self_condition
if isinstance(image_size, int):
image_size = (image_size, image_size)
assert isinstance(image_size, (tuple, list)) and len(image_size) == 2, 'image size must be a integer or a tuple/list of two integers'
self.image_size = image_size
self.objective = objective
assert objective in {'pred_noise', 'pred_x0', 'pred_v'}, 'objective must be either pred_noise (predict noise) or pred_x0 (predict image start) or pred_v (predict v [v-parameterization as defined in appendix D of progressive distillation paper, used in imagen-video successfully])'
# beta schedule 하는 곳
if beta_schedule == 'linear':
beta_schedule_fn = linear_beta_schedule
elif beta_schedule == 'cosine':
beta_schedule_fn = cosine_beta_schedule
elif beta_schedule == 'sigmoid':
beta_schedule_fn = sigmoid_beta_schedule
else:
raise ValueError(f'unknown beta schedule {beta_schedule}')
betas = beta_schedule_fn(timesteps, **schedule_fn_kwargs)
### beta schedule 부분 ###
def linear_beta_schedule(timesteps):
"""
linear schedule, proposed in original ddpm paper
"""
scale = 1000 / timesteps
beta_start = scale * 0.0001
beta_end = scale * 0.02
return torch.linspace(beta_start, beta_end, timesteps, dtype = torch.float64)
def cosine_beta_schedule(timesteps, s = 0.008):
"""
cosine schedule
as proposed in https://openreview.net/forum?id=-NEXDKk8gZ
"""
steps = timesteps + 1
t = torch.linspace(0, timesteps, steps, dtype = torch.float64) / timesteps
alphas_cumprod = torch.cos((t + s) / (1 + s) * math.pi * 0.5) ** 2
alphas_cumprod = alphas_cumprod / alphas_cumprod[0]
betas = 1 - (alphas_cumprod[1:] / alphas_cumprod[:-1])
return torch.clip(betas, 0, 0.999)
# 논문에서의 beta schedule
def sigmoid_beta_schedule(timesteps, start = -3, end = 3, tau = 1, clamp_min = 1e-5):
"""
sigmoid schedule
proposed in https://arxiv.org/abs/2212.11972 - Figure 8
better for images > 64x64, when used during training
"""
# alpha cumprod가 부드럽게 변하게 해주는 beta schedule 방식임
# 예를들어 후반부에서는 천천히 변화해서 역방향 복원이 쉬워짐
steps = timesteps + 1
t = torch.linspace(0, timesteps, steps, dtype = torch.float64) / timesteps
# 시그모이드로 변환된 시작값과 끝값을 구함
v_start = torch.tensor(start / tau).sigmoid()
v_end = torch.tensor(end / tau).sigmoid()
alphas_cumprod = (-(( t * (end - start) + start ) / tau).sigmoid() + v_end) / (v_end - v_start)
alphas_cumprod = alphas_cumprod / alphas_cumprod[0]
betas = 1 - (alphas_cumprod[1:] / alphas_cumprod[:-1])
return torch.clip(betas, 0, 0.999)

첫부분에는 beta schedule을 설정합니다. 논문에서는 단순한 linear schedule을 사용했지만, 실제 ddpm의 default는 sigmoid_beta_schedule로 alphas_cumprod가 매끄럽게 schedule되도록 beta값을 schedule하는 기법을 사용했습니다. 최종적으로 betas 배열을 선언해 beta값을 만듭니다.
# alpha값 정의
alphas = 1. - betas
# alpha_cumprod 정의의
alphas_cumprod = torch.cumprod(alphas, dim=0)
# 벡터의 맨 앞에 1을 추가 --> alpha_cumprod_{t-1} = [1, alpha_cumprod_{1}, alpha_cumprod_{2},... ,alpha_cumprod_{t-2}]
alphas_cumprod_prev = F.pad(alphas_cumprod[:-1], (1, 0), value = 1.)
timesteps, = betas.shape
self.num_timesteps = int(timesteps)
# sampling related parameters
self.sampling_timesteps = default(sampling_timesteps, timesteps) # default num sampling timesteps to number of timesteps at training
assert self.sampling_timesteps <= timesteps
self.is_ddim_sampling = self.sampling_timesteps < timesteps
self.ddim_sampling_eta = ddim_sampling_eta
# helper function to register buffer from float64 to float32
register_buffer = lambda name, val: self.register_buffer(name, val.to(torch.float32))
register_buffer('betas', betas)
register_buffer('alphas_cumprod', alphas_cumprod)
register_buffer('alphas_cumprod_prev', alphas_cumprod_prev)
# calculations for diffusion q(x_t | x_{t-1}) and others
register_buffer('sqrt_alphas_cumprod', torch.sqrt(alphas_cumprod))
register_buffer('sqrt_one_minus_alphas_cumprod', torch.sqrt(1. - alphas_cumprod))
register_buffer('log_one_minus_alphas_cumprod', torch.log(1. - alphas_cumprod))
register_buffer('sqrt_recip_alphas_cumprod', torch.sqrt(1. / alphas_cumprod))
register_buffer('sqrt_recipm1_alphas_cumprod', torch.sqrt(1. / alphas_cumprod - 1))
# calculations for posterior q(x_{t-1} | x_t, x_0)
posterior_variance = betas * (1. - alphas_cumprod_prev) / (1. - alphas_cumprod)
# above: equal to 1. / (1. / (1. - alpha_cumprod_tm1) + alpha_t / beta_t)
register_buffer('posterior_variance', posterior_variance)
# below: log calculation clipped because the posterior variance is 0 at the beginning of the diffusion chain
register_buffer('posterior_log_variance_clipped', torch.log(posterior_variance.clamp(min =1e-20)))
register_buffer('posterior_mean_coef1', betas * torch.sqrt(alphas_cumprod_prev) / (1. - alphas_cumprod))
register_buffer('posterior_mean_coef2', (1. - alphas_cumprod_prev) * torch.sqrt(alphas) / (1. - alphas_cumprod))
# immiscible diffusion
self.immiscible = immiscible
# offset noise strength - in blogpost, they claimed 0.1 was ideal
self.offset_noise_strength = offset_noise_strength
# derive loss weight
# snr - signal noise ratio
snr = alphas_cumprod / (1 - alphas_cumprod)
# https://arxiv.org/abs/2303.09556
maybe_clipped_snr = snr.clone()
if min_snr_loss_weight:
maybe_clipped_snr.clamp_(max = min_snr_gamma)
if objective == 'pred_noise':
register_buffer('loss_weight', maybe_clipped_snr / snr)
elif objective == 'pred_x0':
register_buffer('loss_weight', maybe_clipped_snr)
elif objective == 'pred_v':
register_buffer('loss_weight', maybe_clipped_snr / (snr + 1))
# auto-normalization of data [0, 1] -> [-1, 1] - can turn off by setting it to be False
self.normalize = normalize_to_neg_one_to_one if auto_normalize else identity
self.unnormalize = unnormalize_to_zero_to_one if auto_normalize else identity- alphas
- betas배열로 alphas를 선언하고 이에 대해 \(\alpha_{t}, \alpha_{t-1}\)를 선언합니다.
- sampling_timesteps
- train, sampling할때의 총 timestep의 개수를 선언합니다.
- is_ddim_sampling
- ddpm으로 훈련 & ddim으로 sampling할 것인지에 대한 flag,
- ddim_Sampling_eta
- ddim sampling시에 결정해야하는 deterministic을 결정하는 eta
이전에 선언한 변수를 모델의 state에 저장하기 위해 register_buffer를 사용하여 tensor를 저장합니다. register_buffer로 state를 저장하면 tensor가 모델의 일부로 저장되지만, 학습 시에는 requires_grad=False로 설정되어 자동으로 업데이트되지 않습니다. betas, alphas_cumprod, alphas_cumprod_prev와 alphas를 이용해 ddpm수식에 많이 사용되는 form을 저장합니다.
- posterior_variance
- \(\tilde{\beta}_{t} = \beta_{t}\times\frac{1-\bar{\alpha}_{t-1}}{1-\bar{\alpha}_{t}}\)
- 이는 Reverse Process에서 \(p(x_{t-1}|x_t)\) 모델링에 필요한 variance 값입니다.
- posterior_mean_coef1, posterior_mean_coef2
- \(\tilde{\mu}(x_t, x_0) = \frac{\sqrt{\alpha_t}(1-\bar{\alpha}_{t-1})}{1-\bar{\alpha}_t}x_0 + \frac{\sqrt{\bar{\alpha}_{t-1}}\beta_t}{1-\bar{\alpha_t}}x_t\)
- 이는 Reverse Process모델링에 필요한 mean의 coef2개 입니다.
또한 ddpm을 정의할때 code에서는 3개의 objective를 선언합니다. 여기서는 이에 따라 weight_loss를 분기처리하는 부분을 맨 마지막에서 볼 수 있습니다.
- pred_noise
- objective가 기존처럼 \(\epsilon_{t}\)를 계산하는 것입니다.
- pred_x0
- objective가 \(x_0\)을 예측하는 것으로 이를 통해 train을 합니다.
- pred_v
- objective가 새로 정의된 velocity를 예측하는 것입니다.
마지막에 이미지를 normalize, unnormalize하는 부분을 볼 수 있습니다.
- normalize
- image의 입력을 [-1, 1]로 변환합니다. 이 범위로 ddpm을 훈련합니다.
- unnormalize
- normalize된 이미지를 다시 [0, 1]로 복원해서 렌더링할 수 있게합니다.
DDPM Train
def forward(self, img, *args, **kwargs):
b, c, h, w, device, img_size, = *img.shape, img.device, self.image_size
assert h == img_size[0] and w == img_size[1], f'height and width of image must be {img_size}'
# image의 batchsize만큼 t를 추출한다
t = torch.randint(0, self.num_timesteps, (b,), device=device).long()
# normalize할때 img를 [-1, 1]범위로 놓고 학습을 한다.
img = self.normalize(img)
# t값을 정규화된 image와 함꼐 reverse_process에 넣어준다.
return self.p_losses(img, t, *args, **kwargs)
def p_losses(self, x_start, t, noise = None, offset_noise_strength = None):
b, c, h, w = x_start.shape
noise = default(noise, lambda: torch.randn_like(x_start))
# offset noise - https://www.crosslabs.org/blog/diffusion-with-offset-noise
offset_noise_strength = default(offset_noise_strength, self.offset_noise_strength)
if offset_noise_strength > 0.:
offset_noise = torch.randn(x_start.shape[:2], device = self.device)
noise += offset_noise_strength * rearrange(offset_noise, 'b c -> b c 1 1')
# noise sample
# sampling한 t를 활용해 x_t (noise)를 만듬
x = self.q_sample(x_start = x_start, t = t, noise = noise)
# if doing self-conditioning, 50% of the time, predict x_start from current set of times
# and condition with unet with that
# this technique will slow down training by 25%, but seems to lower FID significantly
x_self_cond = None
# 이전 결괏값을 다시 넣어주기 위함
if self.self_condition and random() < 0.5:
with torch.no_grad():
x_self_cond = self.model_predictions(x, t).pred_x_start
x_self_cond.detach_()
# predict and take gradient step
model_out = self.model(x, t, x_self_cond)
if self.objective == 'pred_noise':
target = noise # x_0 (원본 이미지)를 direct로 예측
elif self.objective == 'pred_x0':
target = x_start # pred_v가 default이다다
elif self.objective == 'pred_v':
v = self.predict_v(x_start, t, noise)
target = v
else:
raise ValueError(f'unknown objective {self.objective}')
# MSE로 target과 model_out과 비교
# 아마 model도 target에 따라 다른 output을 내보내게 했을거임.
loss = F.mse_loss(model_out, target, reduction = 'none')
# batch차원 빼고 싹다 평균냄
loss = reduce(loss, 'b ... -> b', 'mean')
# SNR을 이용해 신호가 강할때(초기 노이즈가 적을때) 높은 가중치를 부여
# 예측이 쉬운 영역에서는 큰 Loss weight를 줘 모델이 정밀하게 학습하도록 유도함
loss = loss * extract(self.loss_weight, t, loss.shape)
return loss.mean()
@autocast('cuda', enabled = False)
def q_sample(self, x_start, t, noise = None):
noise = default(noise, lambda: torch.randn_like(x_start))
if self.immiscible:
assign = self.noise_assignment(x_start, noise)
noise = noise[assign]
return (
extract(self.sqrt_alphas_cumprod, t, x_start.shape) * x_start +
extract(self.sqrt_one_minus_alphas_cumprod, t, x_start.shape) * noise
)
forward와 loss를 구하는 부분입니다. forward에서는 먼저 random int를 [1, timesteps]범위에서 batch size만큼 uniform distribution에서 뽑습니다. 그 후 image를 normalize하고 p_losses라는 함수에 img, t를 같이 넣어줍니다.
p_losses에서는 noise를 먼저 normal gaussian distribution에서 sampling합니다. 그리고
\( \epsilon_{offset}=\epsilon+\sigma \cdot\mathcal{N}(0, I) \)를 통해 offset noise라는 기법을 noise에 적용해줍니다. offsret noise를 추가하여 학습 과정에서 노이즈를 더 안정적으로 예측할 수 있게 됩니다. 그 후, q_sample이라는 함수에 img(x_start)이전에 sampling한 t, noise를 인자로 주어 \(x_t\)를 만듭니다.
이전에 본 Unet(model)에 \(x_t, t\)를 주어 model_out을 뽑아냅니다. 참고로 model_out은 논문상으로는 \(\epsilon_{t}\)이지만 경우에따라서 \(x_0\)이나 velocity가 될 수 있다고 위에서 말했었습니다. 그 이유로, 분기문으로 objective에 따른 mse계산을 위해 target을 선택합니다. 그리고 model의 결과와 target으로 mse를 구하고 batch차원으로 싹다 평균낸 후, 위에서 loss_weight를 정의했는데 이를 적용시켜준 후 해당 loss값을 반환합니다.
p_losses에서 \(x_t\)계산에 사용된 q_sample에서는 \(\sqrt{\bar{\alpha}_t}x_0+\sqrt{1-\bar{\alpha}_t}\epsilon\)을 통해 \(x_t\)를 구합니다. 참고로 q_sample에 있는 immiscible은 만약 특정 데이터가 지나치게 강한 노이즈를 받거나, 특정 노이즈 패턴이 학습되지 않는 경우 적용할 수 있는 방법입니다.
def model_predictions(self, x, t, x_self_cond = None, clip_x_start = False, rederive_pred_noise = False):
model_output = self.model(x, t, x_self_cond)
maybe_clip = partial(torch.clamp, min = -1., max = 1.) if clip_x_start else identity
if self.objective == 'pred_noise':
pred_noise = model_output
x_start = self.predict_start_from_noise(x, t, pred_noise)
x_start = maybe_clip(x_start)
if clip_x_start and rederive_pred_noise:
pred_noise = self.predict_noise_from_start(x, t, x_start)
elif self.objective == 'pred_x0':
x_start = model_output
x_start = maybe_clip(x_start)
pred_noise = self.predict_noise_from_start(x, t, x_start)
elif self.objective == 'pred_v':
v = model_output
x_start = self.predict_start_from_v(x, t, v)
x_start = maybe_clip(x_start)
pred_noise = self.predict_noise_from_start(x, t, x_start)
return ModelPrediction(pred_noise, x_start)
def predict_start_from_noise(self, x_t, t, noise):
return (
extract(self.sqrt_recip_alphas_cumprod, t, x_t.shape) * x_t -
extract(self.sqrt_recipm1_alphas_cumprod, t, x_t.shape) * noise
)p_losses에서 model에 입력을 주입할때 사용한 model_prediction입니다. Unet에 집어넣어 model_output을 만들고, clamp로 [-1, 1]범위로 output의 출력값의 범위를 조절합니다. 그 후, 앞서 말했던 objective에 따라 x_start, pred_noise를 계산합니다. 예를들어, objective == pred_noise에서 pred_noise는 model_output 그 자체일 것이며, x_start는 predict_start_from_noise함수를 통해 \(x_0 = \frac{1}{\sqrt{\bar{\alpha}_t}}(x_{t}-\sqrt{1-\bar{\alpha}_t}\cdot\epsilon_{\theta}\)를 구합니다. 나머지 objective도 동일하게 계산할 수 있고, ModelPrediction이라는 새로운 tuple과같은 구조체로 반환합니다.
DDPM Sampling
@torch.inference_mode()
def sample(self, batch_size = 16, return_all_timesteps = False):
(h, w), channels = self.image_size, self.channels
sample_fn = self.p_sample_loop if not self.is_ddim_sampling else self.ddim_sample
return sample_fn((batch_size, channels, h, w), return_all_timesteps = return_all_timesteps)
# sampling
@torch.inference_mode()
def p_sample_loop(self, shape, return_all_timesteps = False):
batch, device = shape[0], self.device
# x_T는 랜덤 가우시안 노이즈
img = torch.randn(shape, device = device)
imgs = [img]
x_start = None
# t를 역순으로 시작해서 x_0까지 점진적으로 샘플을 복원
for t in tqdm(reversed(range(0, self.num_timesteps)), desc = 'sampling loop time step', total = self.num_timesteps):
# self-cond가 켜져있으면, 이전의 x_start값을 다음 단계의 추가 입력으로 사용
self_cond = x_start if self.self_condition else None
img, x_start = self.p_sample(img, t, self_cond)
imgs.append(img)
ret = img if not return_all_timesteps else torch.stack(imgs, dim = 1)
# 데이터를 [0, 1]범위로 변환 (DDM 학습시에 [-1, 1]범위로 학습했음)
ret = self.unnormalize(ret)
return ret
# 현재 시간 t에서 x_t -> x_t-1을 샘플링
@torch.inference_mode()
def p_sample(self, x, t: int, x_self_cond = None):
# 현재 배치 크기와 디바이스를 가져옴
b, *_, device = *x.shape, self.device
# 모든 배치에대해 현재 t값을 동일한 형태로 변환해줌
batched_times = torch.full((b,), t, device = device, dtype = torch.long)
# 모델이 예측한 x_t-1의 평균값과 분산을 활용
model_mean, _, model_log_variance, x_start = self.p_mean_variance(
x = x, t = batched_times, x_self_cond = x_self_cond, clip_denoised = True)
noise = torch.randn_like(x) if t > 0 else 0. # no noise if t == 0
# x_t-1샘플링을 mu + sigma * noise 형식으로 진행함
pred_img = model_mean + (0.5 * model_log_variance).exp() * noise
def p_mean_variance(self, x, t, x_self_cond = None, clip_denoised = True):
preds = self.model_predictions(x, t, x_self_cond)
x_start = preds.pred_x_start
if clip_denoised:
x_start.clamp_(-1., 1.)
model_mean, posterior_variance, posterior_log_variance = self.q_posterior(x_start = x_start, x_t = x, t = t)
return model_mean, posterior_variance, posterior_log_variance, x_start
return pred_img, x_start
def q_posterior(self, x_start, x_t, t):
posterior_mean = (
extract(self.posterior_mean_coef1, t, x_t.shape) * x_start +
extract(self.posterior_mean_coef2, t, x_t.shape) * x_t
)
posterior_variance = extract(self.posterior_variance, t, x_t.shape)
posterior_log_variance_clipped = extract(self.posterior_log_variance_clipped, t, x_t.shape)
return posterior_mean, posterior_variance, posterior_log_variance_clippedsample함수에서는 sample_fn을 is_ddim_sampling에 따라서 ddpm sampling을 할것인지, ddim sampling을 할것인지로 나눕니다. 그리고 ddpm의 경우에는 p_sample_loop으로 결과를 반환하게 됩니다.
p_sample_loop에서 우선 img를 랜덤 가우시안 노이즈로 설정합니다. 그 후, t를 역순으로 시작하여 img를 점진적으로 timestep만큼 반복하여 sampling을 합니다. 반복문 안에서 p_sample함수를 통해 추정한 \(x_{t-1}, x_{0}\)을 뽑아내고 img배열에 붙힙니다. 그 후, 복원한 sample을 unnormalize시켜 반환합니다.
p_sample은 \(x_t \rightarrow x_{t-1} \)를 하는 과정입니다. 일단 모든 batch만큼 현재 timestep(t)값으로 채운 배열을 만듭니다. t를 통해 모든 batch에 대해 p_mean_variance함수를 통해 model_mean, model_log_variance, x_start를 구합니다. 그리고 noise를 샘플링하고 \(x_{t-1} = \mu + (\frac{1}{2}log(\sigma^{2})\epsilon\)식을 통해 \(x_{t-1}\)의 pred_img를 sampling합니다.
p_sample에서 사용된 p_mean_variance는 \(x_t\), t를 통해 preds를 만들고, x_start(=\(x_0\))과 함께 q_posterior에 투입하여 model_mean, posterior_variance, posterior_log_variance를 구합니다. q_posterior에 사용된 변수들은 위에서 언급한 register buffer에 저장했던 posterior_log_variance_clipped, posterior_mean_coef1, posterior_mean_coef2입니다.
DDIM Sampling
# ddim은 deterministic하게 sampling가능
@torch.inference_mode()
def ddim_sample(self, shape, return_all_timesteps = False):
# eta: stochasticity조절 변수 (0이면 DDPM과 동일), objective: 모델이 예측하는 대상(pred_x0, pred_noise, pred_v...)
batch, device, total_timesteps, sampling_timesteps, eta, objective = shape[0], self.device, self.num_timesteps, self.sampling_timesteps, self.ddim_sampling_eta, self.objective
# ex) T=1000, sampling_timesteps=50 --> time_pairs [(999, 980), (880, 960), ..., (40, 20), (20, 0)]
times = torch.linspace(-1, total_timesteps - 1, steps = sampling_timesteps + 1) # [-1, 0, 1, 2, ..., T-1] when sampling_timesteps == total_timesteps
times = list(reversed(times.int().tolist()))
time_pairs = list(zip(times[:-1], times[1:])) # [(T-1, T-2), (T-2, T-3), ..., (1, 0), (0, -1)]
# img는 gaussian noise로 시작
img = torch.randn(shape, device = device)
imgs = [img]
# self-conditioning도 가능
x_start = None
for time, time_next in tqdm(time_pairs, desc = 'sampling loop time step'):
time_cond = torch.full((batch,), time, device = device, dtype = torch.long)
# self-conditioning이 활성화되면, 이전에 예측한 x_0을 현재 스텝에서 입력으로 활용
self_cond = x_start if self.self_condition else None
# model이 x_t로부터 x_0과 noise를 예측
pred_noise, x_start, *_ = self.model_predictions(img, time_cond, self_cond, clip_x_start = True, rederive_pred_noise = True)
# 마지막 timestep에서는 x_0을 직접 반환
if time_next < 0:
img = x_start
imgs.append(img)
continue
# 𝛼_t
alpha = self.alphas_cumprod[time]
# 𝛼_t-1
alpha_next = self.alphas_cumprod[time_next]
# sigma를 아래와같이 설정하면 forward-process가 Markovian이 되어 generative(reverse-process)가 DDPM이 된다.
# sigma = 0이면 x_t-1, x_0에 대하여 forward process가 deterministic DDIM이 된다.
# 참고 (DDPM의 목적함수로 학습된 implicit probablistic model이기 때문에 DDIM이라 부른다.)
sigma = eta * ((1 - alpha / alpha_next) * (1 - alpha_next) / (1 - alpha)).sqrt()
# 스케일링 계수 (Noise term을 조절)
c = (1 - alpha_next - sigma ** 2).sqrt()
noise = torch.randn_like(img)
img = x_start * alpha_next.sqrt() + \
c * pred_noise + \
sigma * noise
imgs.append(img)
ret = img if not return_all_timesteps else torch.stack(imgs, dim = 1)
ret = self.unnormalize(ret)
return ret
DDIM은 ddpm과 objective의 최적해가 같다고 증명되었고, forward process를 non-Markovian process로 바꾸어 sampling acceleration이 가능한 ICCV2021에 소개된 논문입니다. 대게 ddpm으로 훈련된 모델을 ddim으로 샘플링해 샘플링만을 가속화하고 샘플링 퀄리티를 높일수 있습니다.
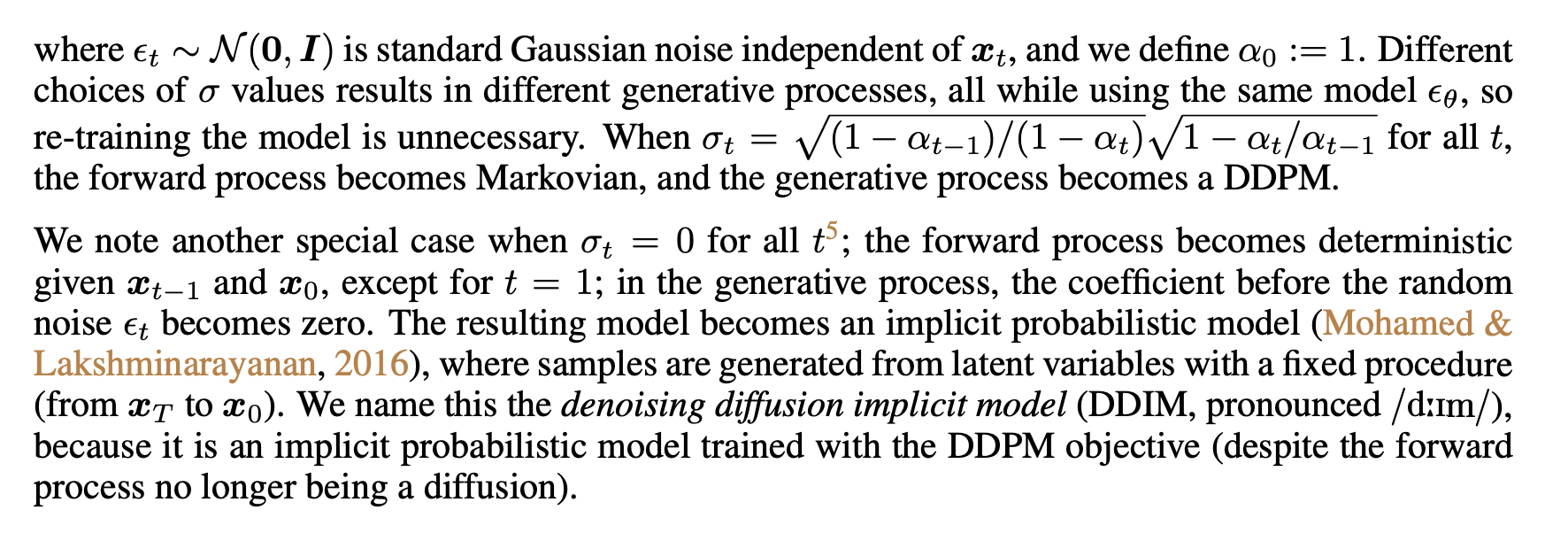
ddim에서 eta는 \(\sigma_t\)를 말하는 것이며 이를 조절하여 ddim을 ddpm으로 만들 수도 있습니다. ddim sampling도 ddpm처럼 img를 gaussian noise로 놓고 시작합니다. 그리고 time_pairs를 따로 정의하는데 이는 sampling acceleration을 위해 미리 sampling timestep으로 timestep을 쪼갠 배열입니다. 그 후, model_prediction으로 ddpm과 동일하게 pred_noise, x_start를 만듭니다. 다음으로 alpha, alpha_next를 현재 timestep을 기반으로 만듭니다.
위에 ddim paper를 보면 모든 t에 대해 \(\sigma_t = \sqrt{(1-\alpha_{t-1})/(1-\alpha_t)}\sqrt{1-\alpha_{t}/\alpha_{t-1}}\)로 설정하면 forward process는 Markovian이 되어 generative process가 DDPM이 된다고 되어있습니다(ddpm에서의 \(\bar{\alpha}=\alpha\)). 이를 기반으로 코드에서도 sigma를 위의 값과 eta의 곱으로 설정합니다. 그리고 noise term을 조절하는 스케일링 계수도 \(c = \sqrt{1-\alpha_{t-1}-\sigma^{2}}\)로 설정합니다(eq12에서의 "direction pointing to \(x_t\)"). 이제 img를 위 식들을 조합해서 만들어 내고, 결괏값(ret)의 배열을 unnormalize해서 반환합니다.
Trainer
# trainer class
class Trainer:
def __init__(
self,
diffusion_model,
folder,
*,
train_batch_size = 16,
gradient_accumulate_every = 1,
augment_horizontal_flip = True, # 이미지가 확률적으로 좌우반전 됨.
train_lr = 1e-4,
train_num_steps = 100000,
ema_update_every = 10,
ema_decay = 0.995,
adam_betas = (0.9, 0.99),
save_and_sample_every = 1000,
num_samples = 25,
results_folder = './results',
amp = False,
mixed_precision_type = 'fp16',
split_batches = True,
convert_image_to = None,
calculate_fid = True,
inception_block_idx = 2048,
max_grad_norm = 1.,
num_fid_samples = 50000,
save_best_and_latest_only = False
):
super().__init__()
# accelerator
self.accelerator = Accelerator(
split_batches = split_batches,
mixed_precision = mixed_precision_type if amp else 'no'
)
# model
self.model = diffusion_model
self.channels = diffusion_model.channels
is_ddim_sampling = diffusion_model.is_ddim_sampling
# default convert_image_to depending on channels
if not exists(convert_image_to):
convert_image_to = {1: 'L', 3: 'RGB', 4: 'RGBA'}.get(self.channels)
# sampling and training hyperparameters
assert has_int_squareroot(num_samples), 'number of samples must have an integer square root'
self.num_samples = num_samples
self.save_and_sample_every = save_and_sample_every
self.batch_size = train_batch_size
self.gradient_accumulate_every = gradient_accumulate_every
assert (train_batch_size * gradient_accumulate_every) >= 16, f'your effective batch size (train_batch_size x gradient_accumulate_every) should be at least 16 or above'
self.train_num_steps = train_num_steps
self.image_size = diffusion_model.image_size
self.max_grad_norm = max_grad_norm
# dataset and dataloader
self.ds = Dataset(folder, self.image_size, augment_horizontal_flip = augment_horizontal_flip, convert_image_to = convert_image_to)
assert len(self.ds) >= 100, 'you should have at least 100 images in your folder. at least 10k images recommended'
dl = DataLoader(self.ds, batch_size = train_batch_size, shuffle = True, pin_memory = True, num_workers = cpu_count())
dl = self.accelerator.prepare(dl)
self.dl = cycle(dl)
# optimizer
self.opt = Adam(diffusion_model.parameters(), lr = train_lr, betas = adam_betas)
# for logging results in a folder periodically
if self.accelerator.is_main_process:
# diffusion_model의 가중치를 부드럽게 업데이트 해주기 위함
self.ema = EMA(diffusion_model, beta = ema_decay, update_every = ema_update_every)
self.ema.to(self.device)
self.results_folder = Path(results_folder)
self.results_folder.mkdir(exist_ok = True)
# step counter state
self.step = 0
# prepare model, dataloader, optimizer with accelerator
self.model, self.opt = self.accelerator.prepare(self.model, self.opt)
# FID-score computation
self.calculate_fid = calculate_fid and self.accelerator.is_main_process
if self.calculate_fid:
from denoising_diffusion_pytorch.fid_evaluation import FIDEvaluation
if not is_ddim_sampling:
self.accelerator.print(
"WARNING: Robust FID computation requires a lot of generated samples and can therefore be very time consuming."\
"Consider using DDIM sampling to save time."
)
self.fid_scorer = FIDEvaluation(
batch_size=self.batch_size,
dl=self.dl,
sampler=self.ema.ema_model,
channels=self.channels,
accelerator=self.accelerator,
stats_dir=results_folder,
device=self.device,
num_fid_samples=num_fid_samples,
inception_block_idx=inception_block_idx
)
if save_best_and_latest_only:
assert calculate_fid, "`calculate_fid` must be True to provide a means for model evaluation for `save_best_and_latest_only`."
self.best_fid = 1e10 # infinite
self.save_best_and_latest_only = save_best_and_latest_only
# dataset classes
class Dataset(Dataset):
def __init__(
self,
folder,
image_size,
exts = ['jpg', 'jpeg', 'png', 'tiff'],
augment_horizontal_flip = False,
convert_image_to = None
):
super().__init__()
self.folder = folder
self.image_size = image_size
self.paths = [p for ext in exts for p in Path(f'{folder}').glob(f'**/*.{ext}')]
maybe_convert_fn = partial(convert_image_to_fn, convert_image_to) if exists(convert_image_to) else nn.Identity()
self.transform = T.Compose([
T.Lambda(maybe_convert_fn),
T.Resize(image_size),
T.RandomHorizontalFlip() if augment_horizontal_flip else nn.Identity(),
T.CenterCrop(image_size),
T.ToTensor() # 범위를 0~1로 바꿔주는 역할도함 --> [-1, 1] (norm, train) --> [0, 1] (unorm, sample)
])
def __len__(self):
return len(self.paths)
def __getitem__(self, index):
path = self.paths[index]
img = Image.open(path)
return self.transform(img)Trainer의 변수 설정 부분입니다. Dataset에 대하여 dataloader를 작성해줍니다. Dataset class를 잠깐보면, transform함수들이 작성되어있는데, Resize -> RandomHorizontalFlip -> CenterCrop -> ToTensor순으로 진행됩니다. dataloader또한, 분산 gpu처리를 가능하게 하기위해 accelerator에 등록해줍니다. Optimizer는 Adam을 씁니다. 그 다음으로accelerator.is_main_process(분산 환경에서 단 한번만 실행하기) 안에 EMA가 정의되어있는데, 이는 diffusion_model의 가중치를 부드럽게 업데이트해주기 위함입니다(현재 가중치를 더 많이 반영).
calculate_fid가 true라면 FIDEvaluation을 정의하여, 실제 dataset에서 num_fid_sample개의 sample을 뽑아 ground truth와 FID를 계산합니다. 첨언으로 직접 훈련시킬때 Trainer에 num_fid_sample을 32 * 10으로 줄건데, 이는 [32, 32, ..., 32]의 배열을 만들어 batch개의 sample을 만들고 inception_feature를 이를 통해 추출한 뒤 32 * 10개의 feature를 활용해 FID를 구해 반환하겠다는 의미입니다.
def train(self):
accelerator = self.accelerator
device = accelerator.device
with tqdm(initial = self.step, total = self.train_num_steps, disable = not accelerator.is_main_process) as pbar:
while self.step < self.train_num_steps:
self.model.train()
total_loss = 0.
# gradient_accumulate는 batch_Size가 큰 것을 simulation하기 위해 사용됨.
for _ in range(self.gradient_accumulate_every):
# dataloader에서 한 배치의 데이터를 가져와서 GPU로 이동
data = next(self.dl).to(device)
# AMP를 사용하여 FP16연산을 자동으로 수행해주도록 해주는 함수
with self.accelerator.autocast():
loss = self.model(data)
# gradient_accumulate_every만큼의 가중치를 한번만 update해야하므로
loss = loss / self.gradient_accumulate_every
total_loss += loss.item()
# FP16, multi-GPU, gradient-accumulation을 자동처리하면서 역전파
self.accelerator.backward(loss)
# loss를 step1개 마다 보여줌
pbar.set_description(f'loss: {total_loss:.4f}')
accelerator.wait_for_everyone()
# gradient cliping을 통해 gradient를 normalization해서 학습 안정성을 높임
accelerator.clip_grad_norm_(self.model.parameters(), self.max_grad_norm)
self.opt.step()
# optimizer의 그래디언트 값을 초기화 하는 역할
self.opt.zero_grad()
accelerator.wait_for_everyone()
self.step += 1
if accelerator.is_main_process:
self.ema.update()
# 일정한 step마다 sampling 및 모델 저장을 실행하는 역할
if self.step != 0 and divisible_by(self.step, self.save_and_sample_every):
# ema를 비활성화
self.ema.ema_model.eval()
# autograd끔 (메모리 최적화)
with torch.inference_mode():
milestone = self.step // self.save_and_sample_every
# 샘플을 여러 배치로 나누는 과정
batches = num_to_groups(self.num_samples, self.batch_size)
# sample을 수행 --> p_sample_loop()
all_images_list = list(map(lambda n: self.ema.ema_model.sample(batch_size=n), batches))
all_images = torch.cat(all_images_list, dim = 0)
# 25개 이미지만 sampling하는 것임
utils.save_image(all_images, str(self.results_folder / f'sample-{milestone}.png'), nrow = int(math.sqrt(self.num_samples)))
# whether to calculate fid
# FID 계산 -> 실제 이미지와 생성된 이미지가 얼마나 유사한지 평가
if self.calculate_fid:
fid_score = self.fid_scorer.fid_score() # *********병목**********
accelerator.print(f'fid_score: {fid_score}')
# FID 기준으로 이전보다 좋으면 best model로서 저장
if self.save_best_and_latest_only:
if self.best_fid > fid_score:
self.best_fid = fid_score
self.save("best")
self.save("latest")
else:
self.save(milestone)
pbar.update(1)
accelerator.print('training complete')대부분의 코드를 주석으로 달았으므로 중요한 부분 몇개만 보겠습니다. 초반에 gradient_accumulate_every변수만큼 반복문을 돌아 data를 가져오고 loss를 gradient_accumulate_every만큼 나누어 backward를 하여 가중치를 누정한 후, opt.step()으로 반복문을 마치고 그 다음에 가중치를 업데이트 합니다. 이로 인해 마치 큰 배치를 학습하는 효과를 낼 수 있습니다.
마지막 부분에 step이 save_and_sample_every에 divisible가능하다면 num_samples개의 sample을 만들어 all_images에 concatenate합니다. 그리고 이를 milestone형태로 저장합니다. 그 후, calculate_fid가 True라면 위에서 정의한 fid_scorer.fid_score()를 통해 num_fid_samples만큼의 sample을 통해 FID를 계산하고, 이 점수를 기반으로 하여 만약 save_best_and_latest_only가 True라면 best fid를 가지는 모델을 저장합니다.
Experiment
import kagglehub
import os
from torchvision import transforms
from torch.utils.data import Dataset, DataLoader
from PIL import Image
import torch
from denoising_diffusion_pytorch import Unet, GaussianDiffusion, Trainer
from torchvision import transforms as T, utils
import math
# Download latest version
path = kagglehub.dataset_download("jessicali9530/celeba-dataset")
print("Path to dataset files:", path)
model = Unet(
dim = 64,
dim_mults = (1, 2, 2), # [64, 64, 128, 128]
flash_attn = False
)
diffusion = GaussianDiffusion(
model,
image_size = 64,
timesteps = 1000, # T --> time step
sampling_timesteps=500, # ddim sampling을 활용
beta_schedule = 'linear',
)
trainer = Trainer(
diffusion,
os.path.join(path, "img_align_celeba/img_align_celeba"),
train_batch_size = 32,
train_lr = 1e-4,
train_num_steps = 100000, # total training steps
gradient_accumulate_every = 2, # gradient accumulation steps
ema_decay = 0.995, # exponential moving average decay
amp = True, # turn on mixed precision
calculate_fid = True, # whether to calculate fid during training
num_fid_samples = 32 * 10,
save_best_and_latest_only=True # 가장 best fid를 가지는 model을 milestone으로 저장하겠다.
)
# trainer.train()
trainer.load(100)
num_samples = 64
all_images_list = list(map(lambda n: trainer.ema.ema_model.sample(batch_size=n), [32, 32]))
all_images = torch.cat(all_images_list, dim = 0)
utils.save_image(all_images, "./results/sample-100-test.png", nrow = int(math.sqrt(num_samples)))- dataset: celeba
- GaussianDiffusion
- image_size: 64
- timesteps: 1000
- sampling_timestep: 500 (ddim)
- ddpm의 2배 속도로 accelerate했다는 의미
- beta_schedule: linear (default = sigmoid)
- Trainer
- train_batch_size: 32
- train_lr: 0.004
- train_num_steps: 100K
- gradient_accumulate_every: 2 (사실상 batch_size = 64를 simulation)
- ema_decay: 0.995
- num_fid_samples: 320
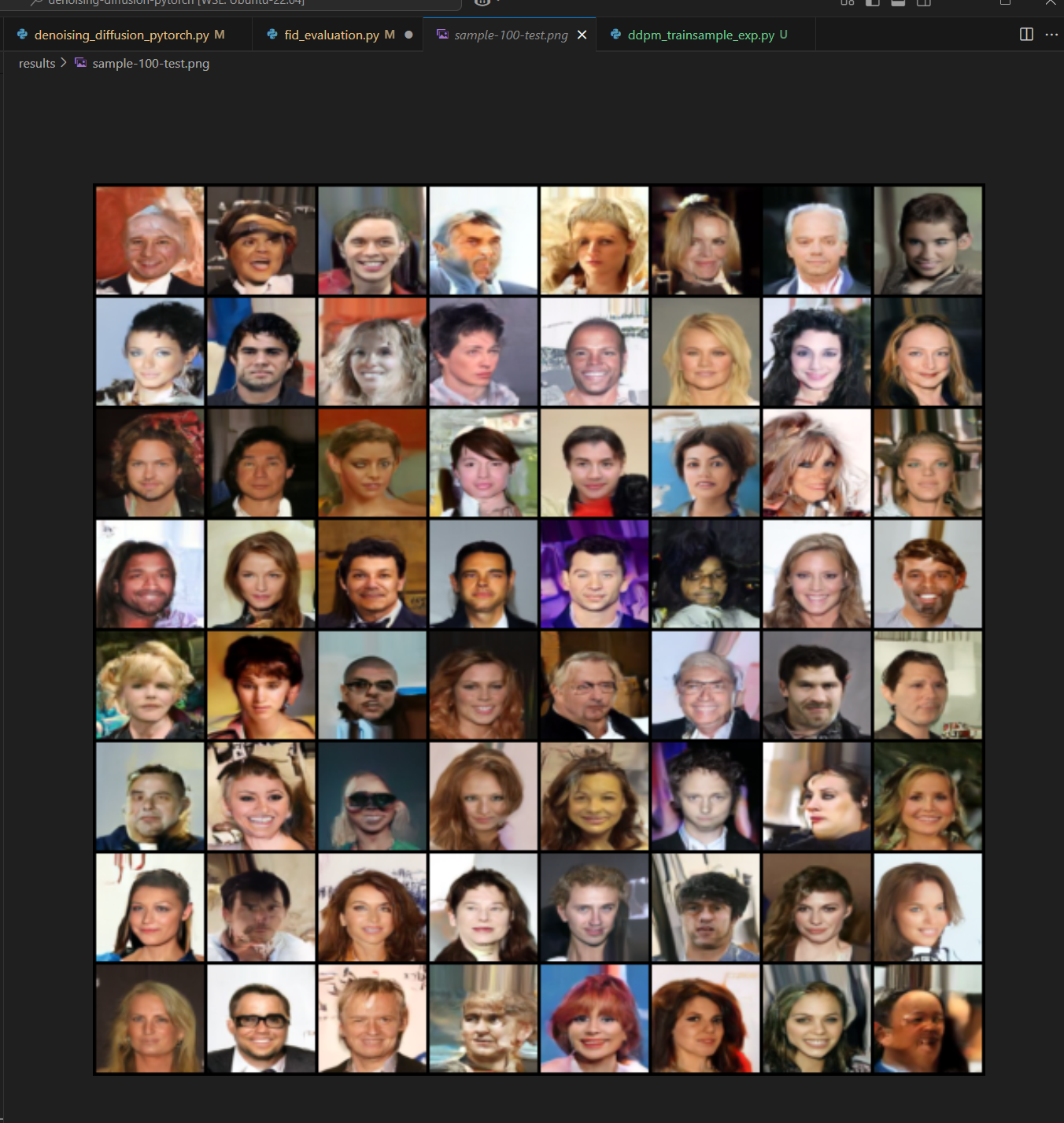
4090 1way로 대략 10시간정도 train을 한 후, 가장 best model의 checkpoint에서 무작위 noise 64개로부터 sampling한 결과입니다.
이 외에도 latent vector(noise)가 같을때 결과가 어떤지와 semantic interpolation등도 실험해보고 싶었지만, 시간관계상 다음에 여유가 될때 한번 해보겠습니다.